|
Iaro Melekhov I am an Applied Scientist at Amazon. Previously, I did a postdoc and completed a PhD at Aalto University in Juho Kannala's research group. During my PhD, I was a research intern at Niantic Labs (London) under the supervision of Prof. Gabriel Brostow and Dr. Daniyar Turmukhambetov. Before this, I spent 6 months in Cambridge, UK working on visual perception algorithms for autonomous cars and having fun at Wayve. I also did a research visit to Marc Pollefeys' Computer Vision and Geometry Group in the Department of Computer Science at ETH Zurich. Email / CV / Google Scholar / X / Github |

|
ResearchMy research interests include machine learning for 3D computer vision, generative AI, large-scale visual mapping and localization, and 3D foundation models. |
News
|
Selected PublicationsThe full list of my papers can be found on Google Scholar. The list of selected projects: |
|
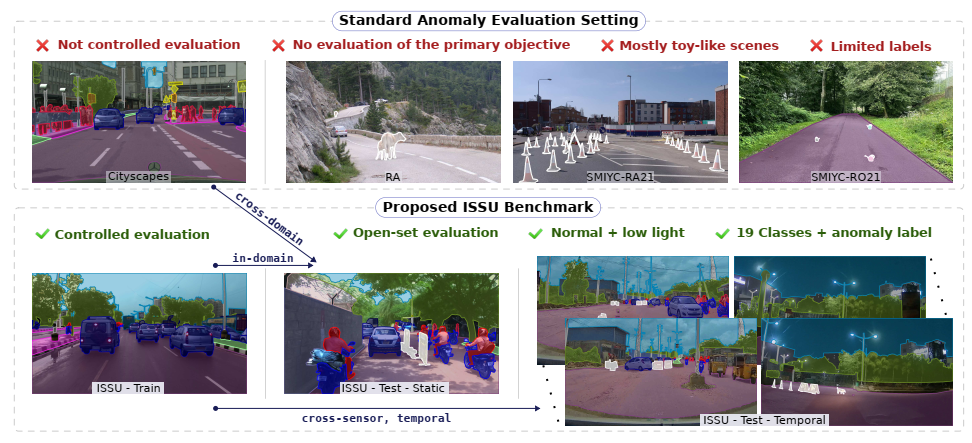
A Dataset for Semantic Segmentation in the Presence of Unknowns
Zakaria Laskar*, Tomáš Vojíř*, Matej Grcić*, Iaroslav Melekhov, Shankar Gangisetty, Juho Kannala, Jiri Matas, Giorgos Tolias, C.V. Jawahar CVPR, 2025 paper / code We propose a novel anomaly segmentation dataset, ISSU, that features a diverse set of anomaly inputs from cluttered real-world environments. |
|
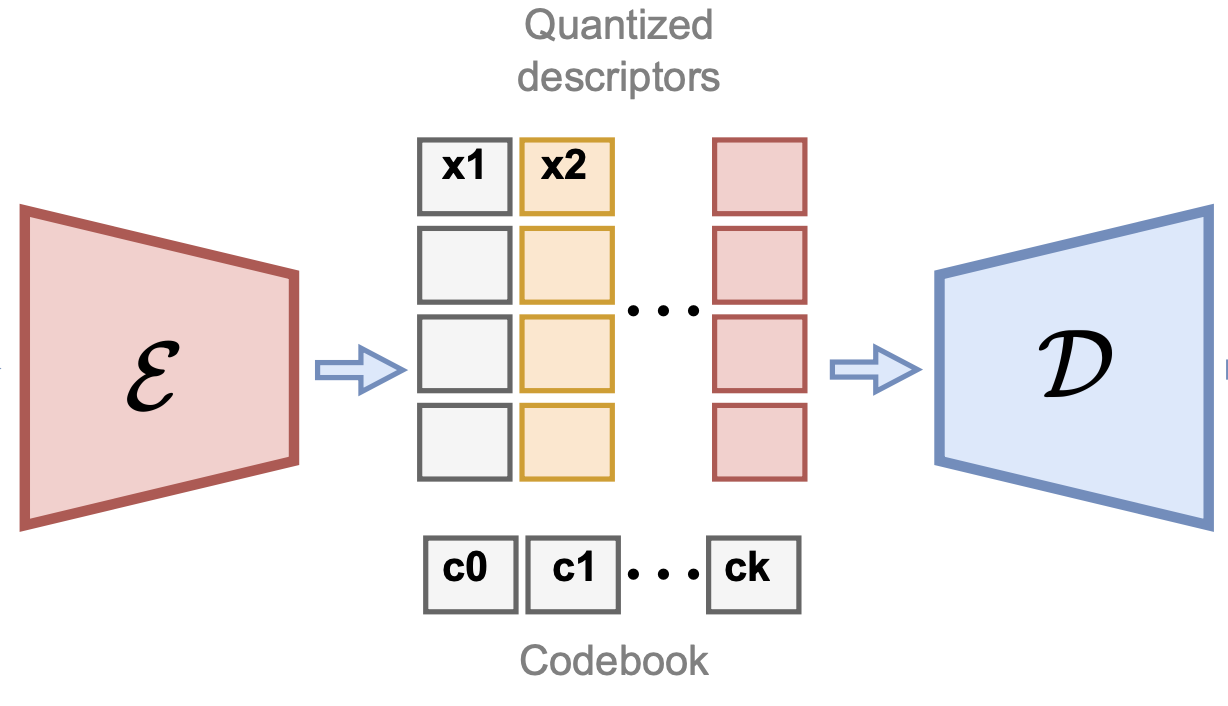
Differentiable Product Quantization for Memory Efficient Camera Relocalization
Zakaria Laskar*, Iaroslav Melekhov*, Assia Benbihi, Shuzhe Wang, Juho Kannala ECCV, 2024 paper / project page / code We propose a differentiable product quantization layer to address the memory efficiency of the camera relocalization pipeline. |

|
DN-Splatter: Depth and Normal Priors for Gaussian Splatting and Meshing
Matias Turkulainen*, Xuqian Ren*, Iaroslav Melekhov, Otto Seiskari, Esa Rahtu, Juho Kannala WACV, 2025 paper / project page / code We extend 3D Gaussian splatting with depth and normal cues to tackle challenging indoor datasets and showcase techniques for efficient mesh extraction. |
|
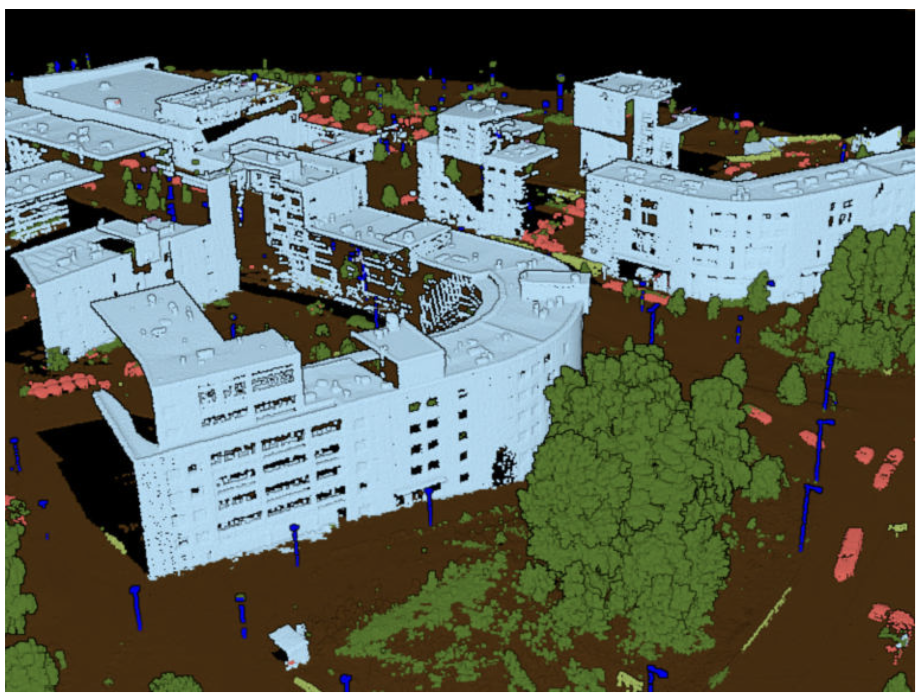
ECLAIR: A High-Fidelity Aerial LiDAR Dataset for Semantic Segmentation
Iaroslav Melekhov*, Anand Umashankar*, Hyeong-Jin Kim, Vladislav Serkov, Dusty Argyle CVPR Workshops, 2024 paper / project page / code We introduce ECLAIR, a diverse and high-fidelity aerial LiDAR dataset for point cloud semantic segmentation. |
|
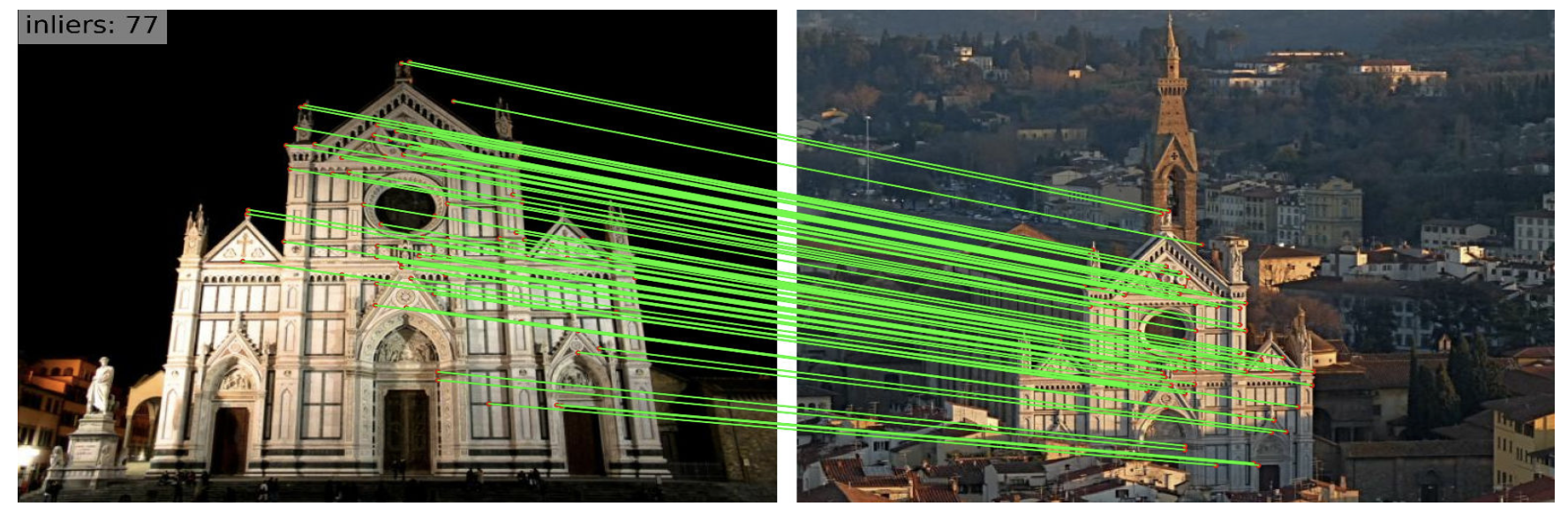
Digging Into Self-Supervised Learning of Feature Descriptors
Iaroslav Melekhov*, Zakaria Laskar*, Xiaotian Li, Shuzhe Wang, Juho Kannala 3DV, 2021 paper / project page / code We show how to use unsupervised learning to optimize a CNN-based local descriptor that is robust to illumination changes and competitve with its fully-supervised counterparts. |
|
This website is based on the source code of Jon Barron's and Torsten Sattler's websites. |